

Drohnen im Baugewerbe
Die Fortschritte in der Technologie haben Drohnen zu einem erschwinglichen Werkzeug in der Bauindustrie gemacht. Tatsächlich ist das Baugewerbe die am schnellsten wachsende Branche, die Drohnen einsetzt. Drohnen können über den gesamten Lebenszyklus eines Projekts Tausende von Euro einsparen, indem sie schnell, sicher und genau wertvolle Daten sammeln, die vielen Bereichen des Bauprojekts zugute kommen.
Bauprojekte erfordern ein breites Spektrum an Fachwissen und Techniken, um erfolgreich abgeschlossen werden zu können. Drohnen können in vielen der Arbeitsabläufe eines Bauprojekts eingesetzt werden, insbesondere bei der Vermessung und Dokumentation. Es ist verständlich, dass viele in der Branche zögern, auf das Drohnenschiff aufzuspringen, da eine hohe Genauigkeit und Zuverlässigkeit der Ergebnisse entscheidend sind. Bei Epotronic testen wir regelmäßig neue Produkte und messen ihre Genauigkeit (relative Genauigkeit, absolute Genauigkeit und Präzision), damit wir unsere Kunden korrekt darüber informieren können, ob Drohnen ihre Projektanforderungen erfüllen.
Topografische Vermessungen
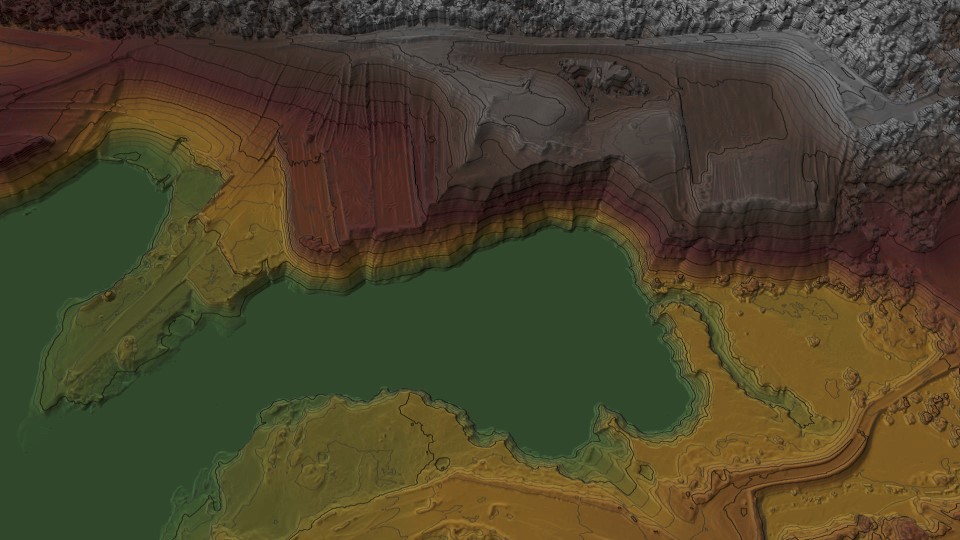
Topografische Vermessungen sind ein wichtiger Bereich in der Bauindustrie, in dem Drohnen unserer Meinung nach große Vorteile bieten. Da topografische Vermessungen in der Regel eine geringere Genauigkeit erfordern als Ingenieur- und Bestandsvermessungen, lassen sich diese mit Drohnen leichter erfassen, ohne dass man dafür die teuersten Modelle und Verarbeitungssoftware kaufen muss. Da Drohnen in der Lage sind, das Vermessungsgebiet nahtlos zu überfliegen und innerhalb weniger Minuten Millionen von Datenpunkten zu erfassen, wird die Effizienz einer topografischen Vermessung drastisch erhöht.

Bestandsvermessungen
Zusätzlich zu topografischen Vermessungen können Drohnen auch für Bestandsvermessungen eingesetzt werden, d. h. für Vermessungen von Infrastrukturen, die gerade gebaut werden, oder von kürzlich fertiggestellten Gebäuden, um zu prüfen, ob sie innerhalb der Genauigkeitstoleranzen der Planung liegen. Die Genauigkeitsanforderungen sind daher höher als bei topografischen Vermessungen, was bedeutet, dass Drohnen und Sensoren mit höheren Spezifikationen erforderlich sind. Mit diesen, wie dem Zenmuse P1 oder dem Riegl MiniVux-3, können Genauigkeiten von bis zu 2 cm erreicht werden*. Wie bei topografischen Vermessungen können die Daten mit unglaublicher Effizienz erfasst werden, was die Kosten für das Bauprojekt senkt.
*Abhängig von den Flugparametern und der Verarbeitungstechnik.

Hochgenaue Vermessungen
Vermessungen, die genaueste Messungen erfordern, wie z. B. Kontrollmessungen, Absteckungen sowie topografische und Bestandsvermessungen von Projekten für hochgenaue Tiefbauprojekte, können in der Regel nicht allein mit Drohnen durchgeführt werden. Sie können jedoch zusätzlich zu herkömmlichen Geräten mit höherer Genauigkeit eingesetzt werden. So können beispielsweise die von einer Drohne erfassten Daten bei der Erstellung einer CAD-Zeichnung auf der Grundlage von Messungen, die mit herkömmlichen Methoden ermittelt wurden, als Kontext verwendet werden.
Lösungen
Die ideale Lösung hängt von vielen Faktoren ab, z. B. von der Genauigkeit, den zeitlichen Beschränkungen und den rechtlichen Aspekten. Unter dem folgenden Link stellen wir einige unserer wichtigsten Empfehlungen vor.
Klicken Sie hier um zu unserer empfohlenen Lösung zu gelangen

Mit ein paar Klicks von der Drohne zum CAD
Der Einsatz von Drohnen stellt einen großen Unterschied in der Art der Daten dar, die traditionell von Vermessungsingenieuren verwendet werden. Virtual Surveyor integriert traditionelle Methoden und Ergebnisse, um Vermessungsingenieuren mit wenig oder keiner Drohnenerfahrung eine intuitive Erfahrung zu bieten.















